Ric & Robots
MEDICAL ROBOTICS

SPACE ROBOTICS
RESCUE ROBOTICS

MEDICAL ROBOTICS

Spine Robotic Assistant ALAYA






Simulink diagram that simulates a 6DoF manipulator that has been used in surgical robotics.
The diagram solves the constrained movements of a manipulator that holds a surgical instrument that is introduced inside the patient's abdomen using a trocar. In this situation, the movements are performed taking into account the insertion point (fulcrum). To solve this issue, a Jacobian based position control scheme has been used, which is able to generate the manipulator joint angles references to perform a movement taking into account a previously fixed fulcrum point. The obtained joint angles are then used to animate a 3D model (VRML) of the 6DoF manipulator. Morever, this 3D model allows to place the instrument tip at any orientation using Euler ZYZ angles or a rotation matrix.
The 3D model can also be used for teaching or research purposes, e.g. to calculate its kinematics.The Jacobian based position control scheme has been presented in the paper:
Perez-del-Pulgar, C.J.; Munoz, V.F.; Velasco, J.J.; Gomez, R., "Parallel force-position control scheme with fuzzy gain tuning for single port laparoscopic surgery," in Control, Automation and Systems (ICCAS), 2013 13th International Conference on , vol., no., pp.101-106, 20-23 Oct. 2013.
doi: 10.1109/ICCAS.2013.6703871Please, reference this paper if you use the model.This work has been developed by the University of Malaga students:
Ana María Gómez Delgado
José Ricardo Sánchez Ibáñez
Ignacio Alzugaray López
Pedro Cervera Pedregosa
Juan José Velasco ManzanaresCite As
Carlos Pérez del Pulgar (2025). 6DoF robot simulink diagram for simulation (https://www.mathworks.com/matlabcentral/fileexchange/54455-6dof-robot-simulink-diagram-for-simulation), MATLAB Central File Exchange. Retrieved March 4, 2025.Links of interest:
- LinkedIn Post about arrival
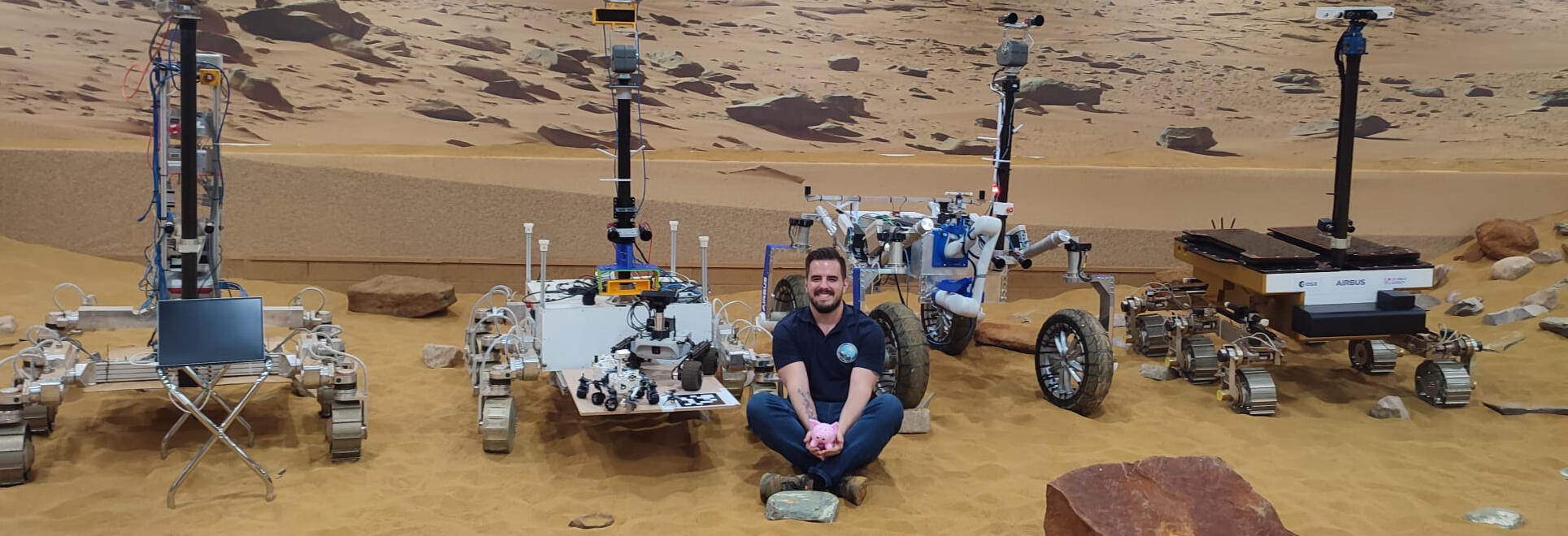
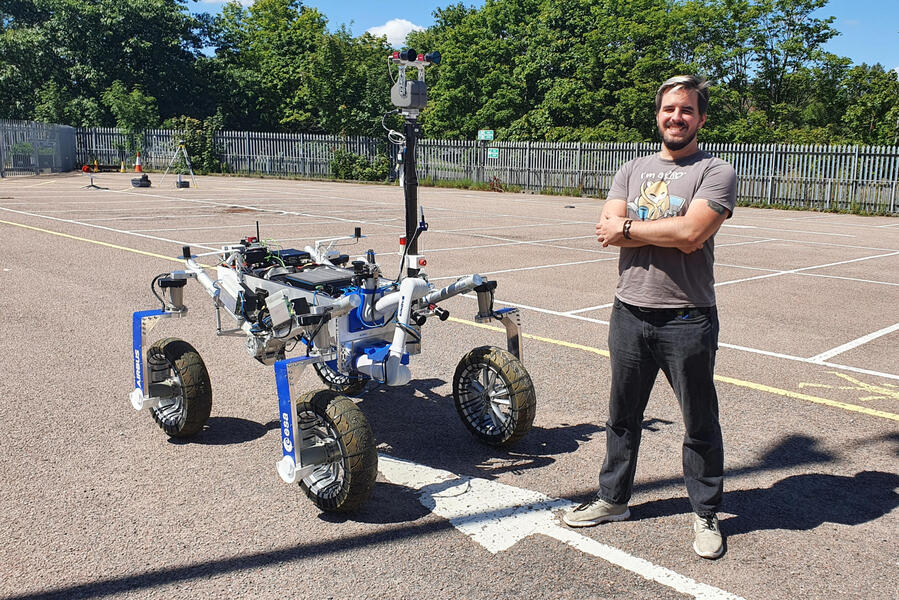
SPACE ROBOTICS

Integrated Breadboard 4
Links of interest:
- ESA Blog Post
- BBC Post
- Independent article
- Airbus LinkedIn Post

Integrated Breadboard 3

Links of interest:
- ESA Blog PostPublications:
- Field Trials of the Integrated BreadBoard 3: Demonstrating a Rover System in the Sample Fetch Rover Mission Context
- DESIGN AND PLANNING OF FIELD TRIALS FOR THE INTEGRATED BREADBOARD 3 (IBB3): TOWARDS THE DEMONSTRATION OF AN
INTEGRATED ROVER SYSTEM IN THE SFR MISSION CONTEXT
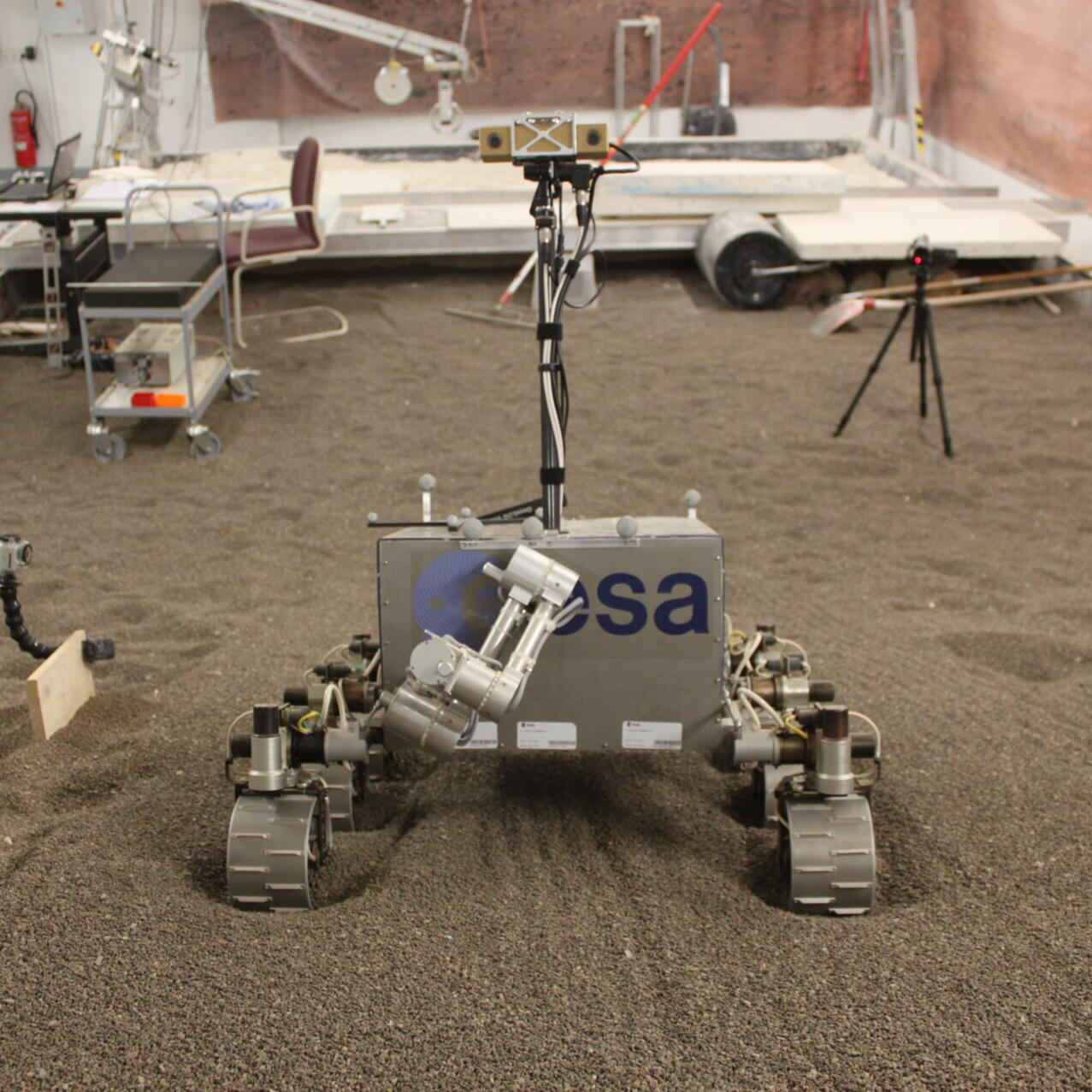
Sample Fetch Rover - Integrated Breadboard 2
Links of interest:
- ESA Blog PostPublications:
- Roving with the buzzards: a TRL5 autonomy marathon




ADE: Autonomous DEcision making in very long traverses
Links of interest:
- Project Description
- DFKI Post about final field trials





ARES: Autonomous Routing on Extreme Surfaces

Links of interest:
- TBD
RESCUE ROBOTICS
Rescue Robotics Projects: FIRST-ROB and TRUST-ROB

Rescue robotics. Development and implementation of anisotropic path planner for autonomous navigation of mobile robots on irregular terrains.
National research project DPI2015-65186-R



Extreme Path Planning for Exploration Mobile Robots
Increasing autonomy on mobile robots is essential. The main reason is to provide them with the ability to perform operations on their own. This skill is desirable in fields such as planetary exploration or search and rescue operations. Mobile robots could carry out more tasks in a time window by not relying on human intervention. These systems could, for instance, drive longer distances and hence reach more places. Autonomous navigation rests on the use of path planning algorithms. These algorithms generate a path that guides the robot towards a target location. Yet, off-road and unstructured environments can pose a challenge to its locomotion capabilities. Thus, the path planner must address them at the same time as the robot mobility skills. In this way, this algorithm finds the path that minimizes a metric such as energy consumption. Not always precise information describing the environments is complete. The path planner must hence dynamically update the generated path whenever necessary. The robot may deal with terrain elements that were not addressed before in situ. This thesis tackles problems that arise in autonomous navigation on irregular terrains. As a first step, it presents an overview of the existing path planning algorithms. This overview focuses on those algorithms that are compatible with ground mobile robots. It serves to build a classification of the existing approaches. This classification rests on their functionality. In a few words, it tackles the different ways in which path planner model and process the environment and the robot mobility. This thesis puts the focus on some of them that are capable to produce the globally optimal path given a cost map. These are called PDE (Partial Derivative Equation) solving algorithms. How to adapt these algorithms to the autonomous navigation of irregular terrains is the cornerstone of this thesis. It deals first with the use of a path planner along with a reconfigurable robot.

